一進一退な感じですが、
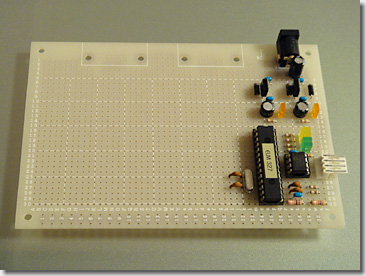
基板上の部品の配置を見直しました。
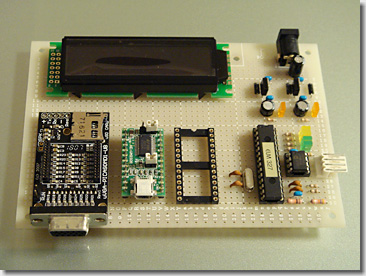
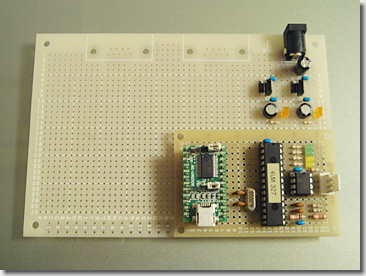
まず、「LCDモジュール」を、基板中央に配置しました。最終的には、基板左下にある「μVGA モジュール」を使って、各種情報をiDriveに表示するようにしますが、LCDモジュールは、開発時のデバッグ用として使用します。
このLCDモジュールは、一般的な16x2行のものですが、BMWと同じ「アンバーオレンジ」のバックライトを持つものを、探し出しました。
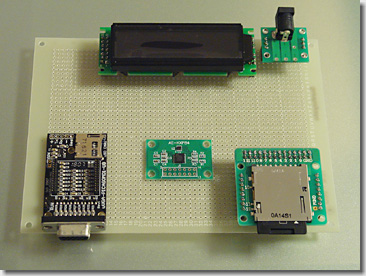
基板中心には、「3軸加速度センサモジュール」を配置します。
さらに、基板右下に、「SDカードモジュール」を新たに追加しました。これは、OBDインタフェースのデータロガー用として、各種情報をファイルを書き出すためのものです。
PIC18用にFAT16ファイルシステムのライブラリが提供されているので、これを改造して、なんとかPIC24Fで使えるようにしたいと思います。
| 17 Related Entries | |
 Circuit Board (2) | Next  Print Circuit |
Posted by  SOARISTO at 17:35:16
|
Comments(2)
|
Trackback(0)
SOARISTO at 17:35:16
|
Comments(2)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2010/05/100516.php
SOARISTO at 17:35:16
|
Comments(2)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2010/05/100516.php