前回の続きです。
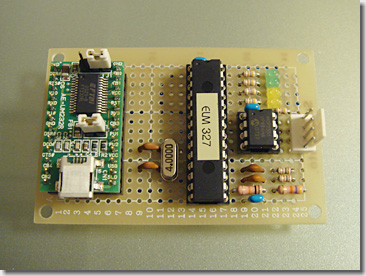
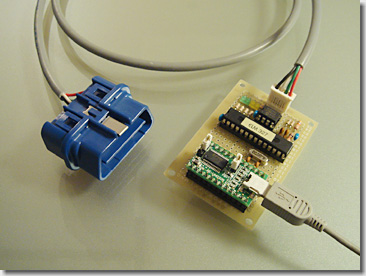
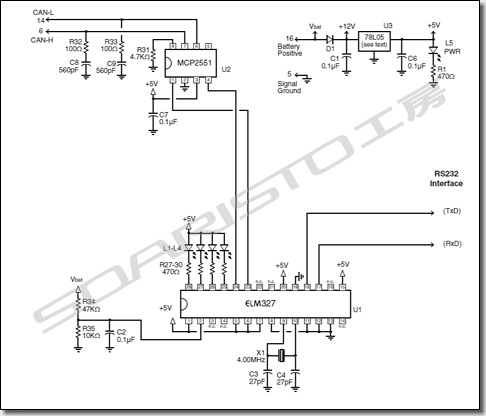
いよいよ、OBD-IIインタフェースを、M3 Coupeに接続します。

運転席右下(右ハンドル車の場合)のOBD-IIポートに、コネクタを挿入します。
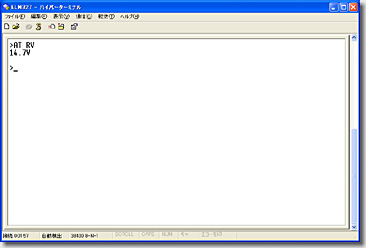
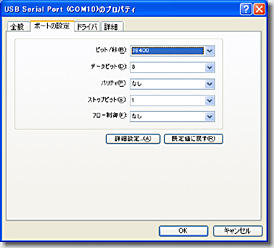
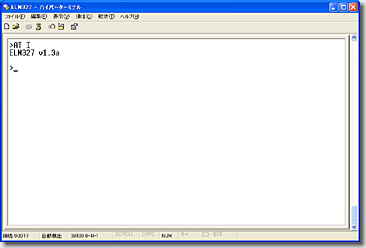
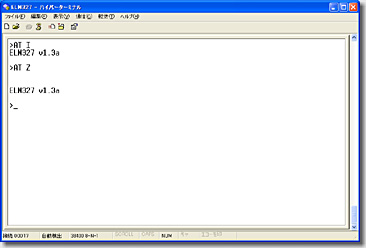
はじめに、「ハイパーターミナル」を使って、車両側と通信できているか確認します。
「AT RV」(RV:Read the Voltage)と投げてみます。
「14.7V」と返ってきました。ELM327が感知しているバッテリー電圧です。
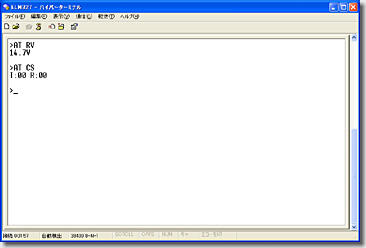
「AT CS」(CS:show the CAN Status counts)と投げてみます。
「T:00 R:00」と返ってきました。CANバスとの通信における送受信エラーの発生回数です。
く~っ、やりました。自作の回路を使って、BMWと会話することができましたっ!!0xF9CF
ふつーのヒトから見れば、大したことないように見えるかも知れませんが、これは大きな前進です。
#この歓びは、イイ年こいて、電車の中でピコピコDSやPSPやってるような連中には、一生味わうことのできない歓びでしょう。0xF9D1

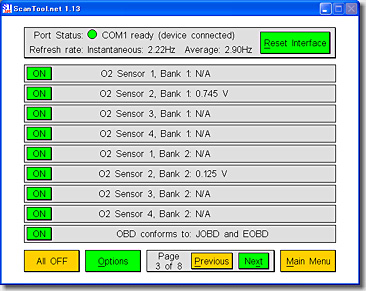
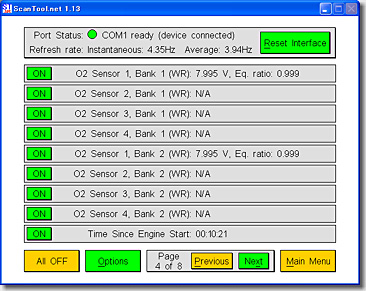
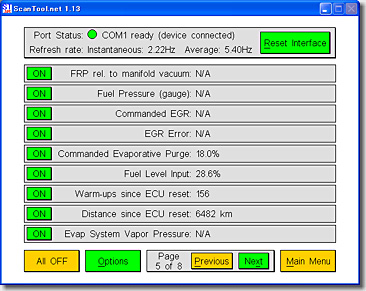
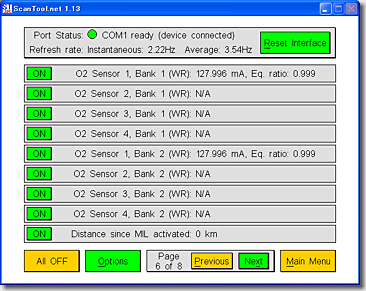
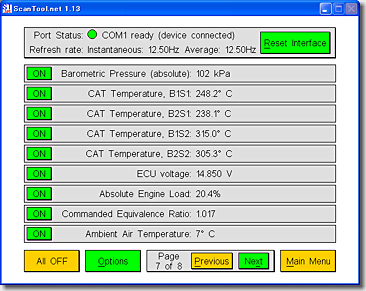
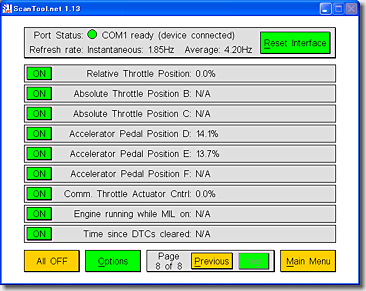
つづいて、ScanTool.net社から無償配布されている「OBD-II Software」を使って、CANバス上に流れているデータを見てみることにします。
左がドイツ語版、右が英語版です。
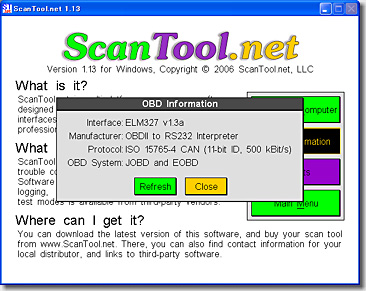
OBD情報を表示させたところです。CANネットワークとは、500kbpsで通信していることが分かります。
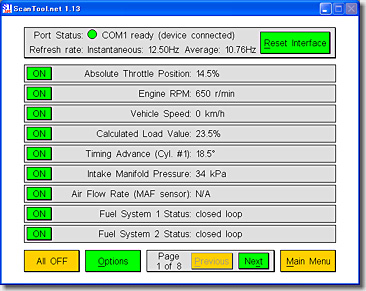
MAF(Mass Air Flow)センサからの情報が読み出せれば、比較的簡単に「瞬間燃費計」が作れるのですが、データを出していないようです。残念。
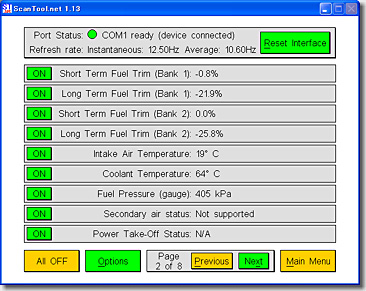
ということで、自作のOBD-IIインタフェースを介して、各種情報を取り出せることが分かりました。
つぎは、Visual C++を使って、CANバス上に流れているデータを、ロギングするツールを作ることにします。
〔関連情報〕
・OBD-II Software
| 17 Related Entries | |
 I Love Hard!? | Next  Tiny VGA Graphics Controller |
 SOARISTO at 00:00:00
|
Comments(2)
|
Trackback(0)
SOARISTO at 00:00:00
|
Comments(2)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2010/01/100123.php