
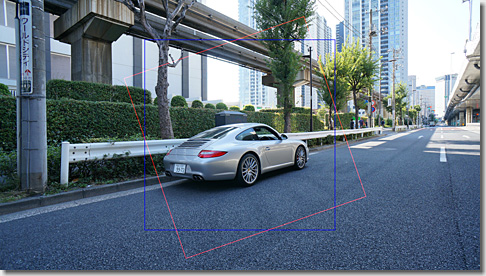
前回までの検証で、左右2つの実画像において、これら2つの画像の間の上下方向(ティルト)と左右方向(パン)のズレ、および回転方向(ロール)のズレを推定、補正することにより、広角画像が合成できることが分かりました。
これまでは、Sonyの「αNEX-5R」で撮影した画像を使っていましたが、いよいよLogicoolの「Webcam C930e」からの映像を使うことにします。

以前に購入した、nVIDIAの「Jetson TK1」です。

2つのカメラは、ステレオビジョン(立体視)に使うのではなく、広角映像を生成するため、少し外側を向かせて設置します。
(以下、編集中)
| 14 Related Entries | |
 【OpenCV】回転不変位相限定相関法による画像マッチング(2) | |
Posted by  SOARISTO at 20:44:10
|
Comment(0)
|
Trackback(0)
SOARISTO at 20:44:10
|
Comment(0)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2015/03/150301.php
SOARISTO at 20:44:10
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2015/03/150301.php











{kind=link}