いろいろ平行して進めておりまして、遅々として進んでいませんが、前回の続きです。
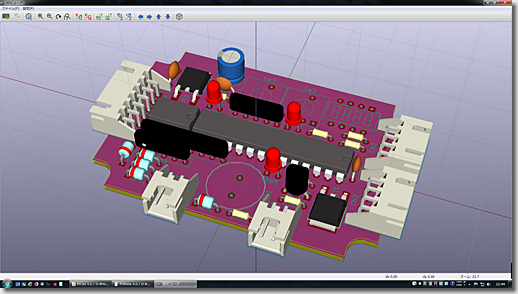
これまで、Porsche 911の時に作製した「セキュリティLED制御回路」を元に、プリント基板を起こし、製品レベルまで仕立てました。(表示系)
その後、加速度センサとドップラーセンサとを組み合わせ、「衝撃&人体検知ドラレコ電源制御回路」を作製し、プリント基板を起こしました。(検知系)
車内への設置にあたっては、運転席の足下あたりに、2つのプラボックス(表示系+検知系)を取り付けることになりますが、電源周りを統合すれば、もう少しコンパクトな回路になりそうです。
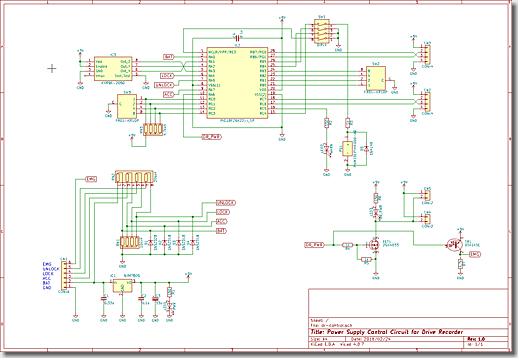
また、PICを動作させるプログラム(タイマー割り込みルーチン等)が重複していることもあり、表示系と検知系の回路を統合することにしました。
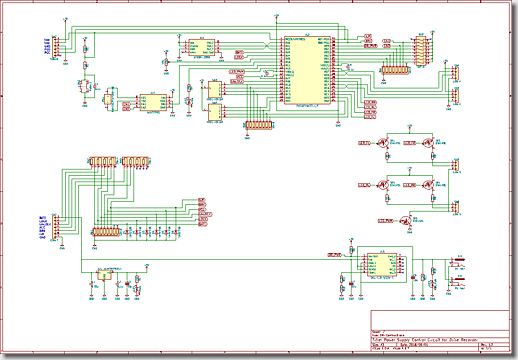
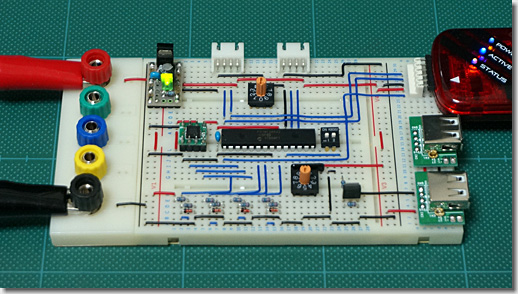
統合した回路が、こちら。
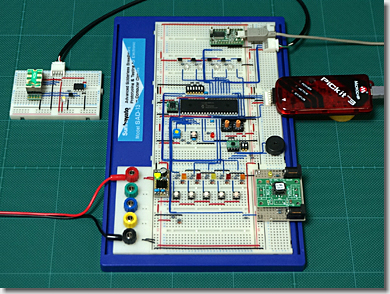
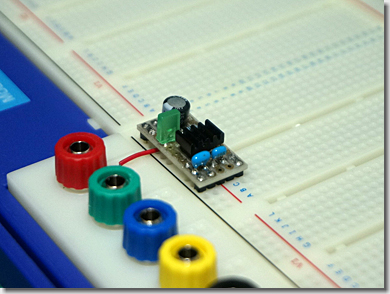
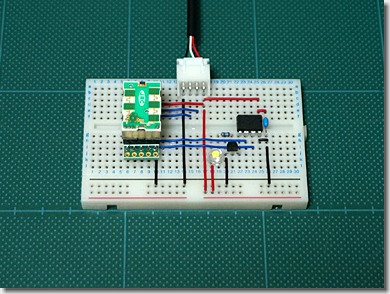
まずは、ブレッドボード上で動作チェックすることにします。
以前に比べ、集積度が増しているため、ブレッドボード3枚に展開しました。


Posted by  SOARISTO at 09:58:04
|
Comment(0)
|
Trackback(0)
SOARISTO at 09:58:04
|
Comment(0)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2018/09/180909.php
SOARISTO at 09:58:04
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2018/09/180909.php