前回の続きです。
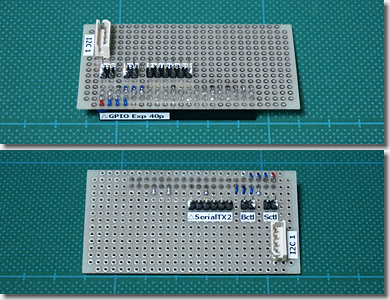
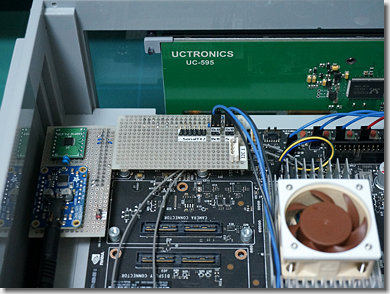
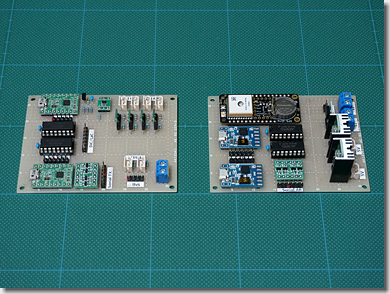
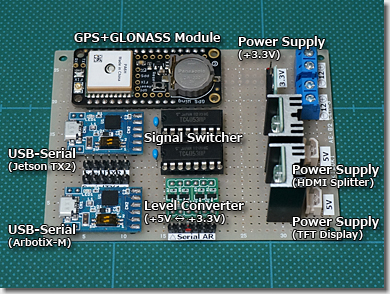
基台に搭載する各種インタフェースができあがったところで、いよいよ、基台の上部、旋回台座の作製に入ります。
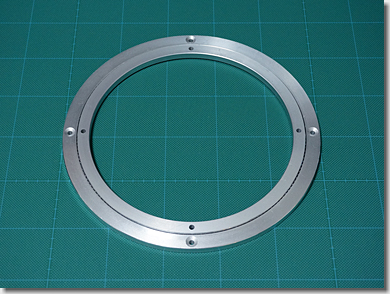
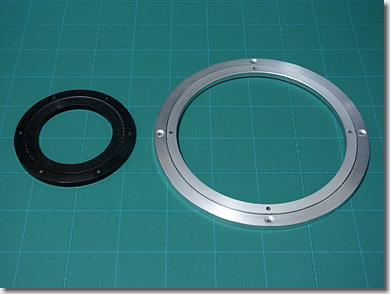
こちらは、今回の作製のキモとなる、「旋回ベアリング」です。
アルミ合金製で、外径がφ250mm、内径が194mm。
さすがの日本製、旋回させても、しっかりとした剛性感があります。
#粗悪なちゅーこく製なんて、いっさい使わないぞ!と。0xF9D1
さらに、このモデルには、隣接するボールベアリング間に静音材を入れてあるため、動作時の「ゴリゴリ」音が、通常のものより抑えられています。
美術館や高級ホテルなど、静かさが求められるところに使われているようです。
実は、7年3ヶ月ほど前に、教育用アームロボット、「WidowX Robot Arm Kit」(1,499.95ドル)を購入していました。
その目的は、ロボットアームの台座にある、旋回ベアリングを入手するためでした。
#もちろん、それだけではありませんが。
画像左側は、キット付属の旋回ベアリング(19.95ドル)で、外径はφ140mm。
当初は、このφ140mmのものを使う予定でしたが、設計を見直し、モデルサイズぎりぎりの、φ250mmのものを使うことにしました。
これにより、砲塔の“頭でっかち”状態を回避し、旋回時の安定性や剛性感を、より高めることができます。
#18万円近くも出して、けっきょく使わないという・・・。0xF9C8
続きを読む: ペガソス計画(24) - 週刊「ファランクスを作る」
| 27 Related Entries | |
 ペガソス計画(23) - 週刊「ファランクスを作る」 | |
Posted by  SOARISTO at 20:34:06
|
Comment(0)
|
Trackback(0)
SOARISTO at 20:34:06
|
Comment(0)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2023/05/230507.php
SOARISTO at 20:34:06
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2023/05/230507.php