
前回の続きです。
基台に搭載する各種インタフェースができあがったところで、いよいよ、基台の上部、旋回台座の作製に入ります。
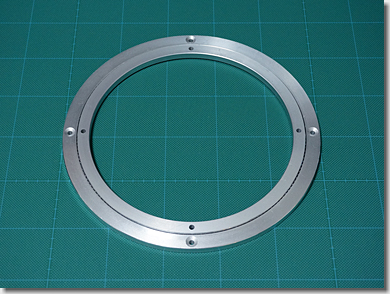
こちらは、今回の作製のキモとなる、「旋回ベアリング」です。
アルミ合金製で、外径がφ250mm、内径が194mm。
さすがの日本製、旋回させても、しっかりとした剛性感があります。
#粗悪なちゅーこく製なんて、いっさい使わないぞ!と。0xF9D1
さらに、このモデルには、隣接するボールベアリング間に静音材を入れてあるため、動作時の「ゴリゴリ」音が、通常のものより抑えられています。
美術館や高級ホテルなど、静かさが求められるところに使われているようです。
実は、7年3ヶ月ほど前に、教育用アームロボット、「WidowX Robot Arm Kit」(1,499.95ドル)を購入していました。
その目的は、ロボットアームの台座にある、旋回ベアリングを入手するためでした。
#もちろん、それだけではありませんが。
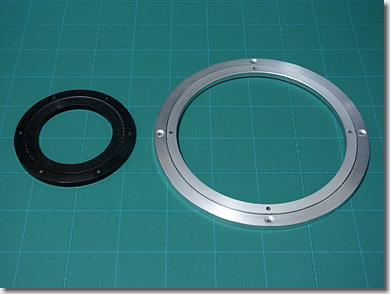
画像左側は、キット付属の旋回ベアリング(19.95ドル)で、外径はφ140mm。
当初は、このφ140mmのものを使う予定でしたが、設計を見直し、モデルサイズぎりぎりの、φ250mmのものを使うことにしました。
これにより、砲塔の“頭でっかち”状態を回避し、旋回時の安定性や剛性感を、より高めることができます。
#18万円近くも出して、けっきょく使わないという・・・。0xF9C8
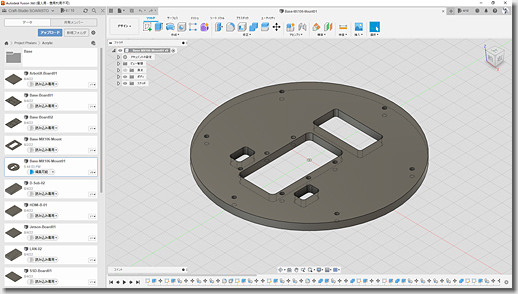
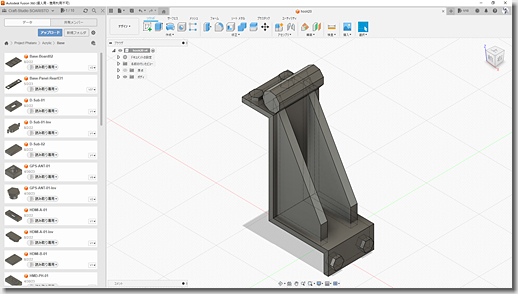
まずは、砲塔を旋回させるサーボモータを取り付ける、センタープレートです。
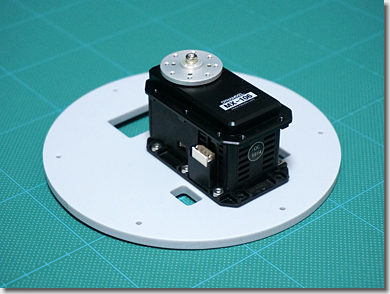
切り出したセンタープレートに、サーボモータを取り付けたところ。
サーボモータは、Dynamixelの「Robot Actuator」シリーズを用います。
当初は、「MX-64T」というモデルを使う予定でしたが、設計を見直し、上位モデルの「MX-106T」を使うことにしました。
「MX-64T」の軸トルクは、定格で6.0[Nm]もあり、これでも十分なパワーですが、「MX-106T」は、さらのその上の、8.4[Nm]ものパワーを持っています。
砲塔の剛性を高めることにより、かなりの重量となると想定されることから、台座を滑らかに旋回させるため、同社のボックスタイプのサーボモータの中では、最強のモデルに選択し直しました。
#その分、お値段も、327.90ドル(MX-64T)から、539.90ドル(MX-106T)へと、最強になっていますが。0xF9FC
また、Snapmaker 2.0 A350は、かなりの成型精度を持っていますが、組み立て時の誤差を考慮し、旋回台座の軸中心を合わせるため、センタープレートの取付位置を、微妙に調整できるよう設計してあります。
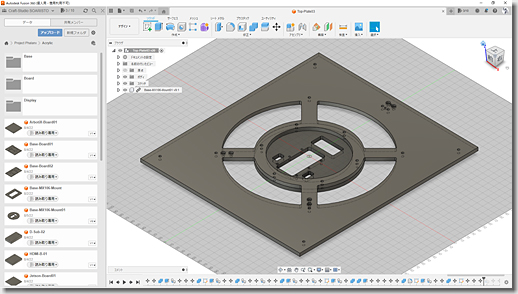
つづいて、基台のトッププレートです。
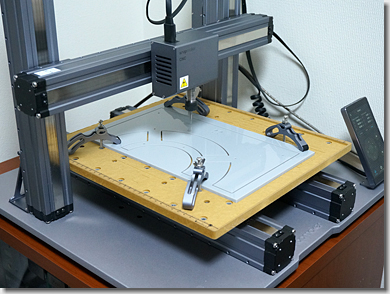
5mm厚のアクリル板を、切り出します。
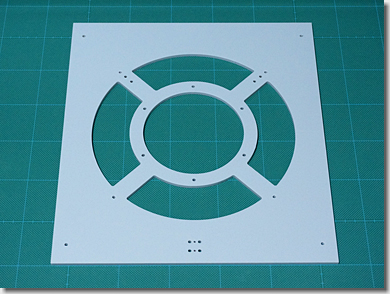
切り出されたトッププレート。

各種インタフェースの搭載が完了した基台です。
いったん、大方のパーツを取り外します。
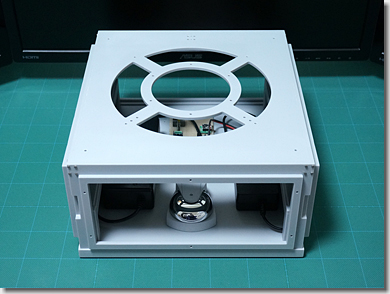
トッププレートを組み付け、ジクロロメタン(アクリル樹脂用の接着剤)を使って溶着します。
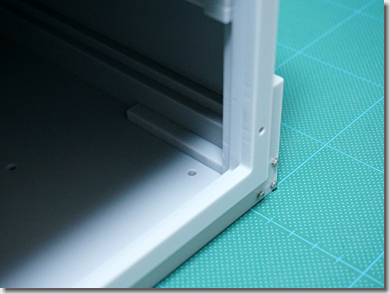
トッププレートには、かなりの荷重が掛かると想定されることから、支持するパーツを、四隅に入れておきました。
これにより、トッププレートとサイドプレート(のフレーム部)が、がっちり固定できました。
ディテールアップのための小物を削り出します。
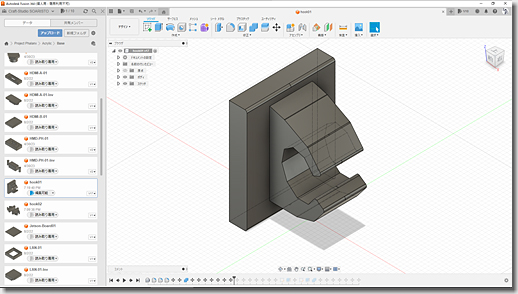
こちらは、かなり細かいパーツです。
(つづく)
| 27 Related Entries | |
 ペガソス計画(23) - 週刊「ファランクスを作る」 | |
 SOARISTO at 20:34:06
|
Comment(0)
|
Trackback(0)
SOARISTO at 20:34:06
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2023/05/230507.php
Post Comment