
前回の続きです。
オーディオ出力回路とDCモータ制御回路ができたところで、さらなる回路の追加です。
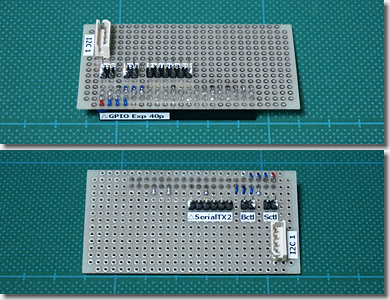
Jetson TX2のマザーボード上の「Expansion Header」(J21, 40pin)から、必要な信号を取り出すためのドーターボードを作製します。
GPS+GLONASSモジュールとのシリアル通信のための信号や、Adafruitの各モジュールとのI2C通信のための信号を取り出します。
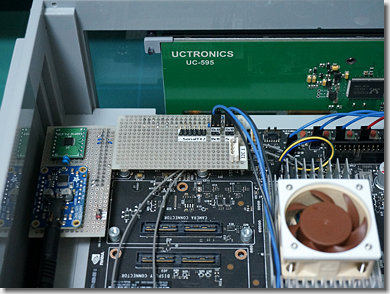
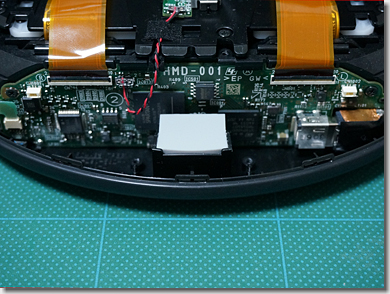
ドーターボードを取り付けたところです。
中央が「Expansion Header」(40pin)用のもの、左側が「GPIO Expansion Header」(30pin)用のものです。
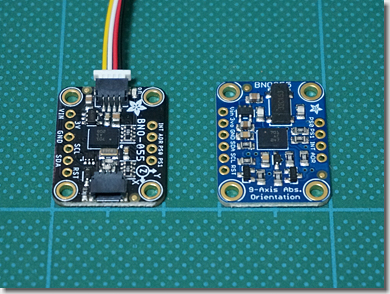
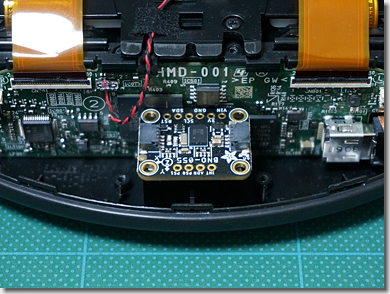
こちらは、Adafruitの「9-DOF Absolute Orientation IMU Fusion Breakout - BNO055」です。
Boschの「BNO055」を搭載した9軸センサで、3軸加速度計、3軸磁力計、3軸ジャイロスコープの各機能が統合されています。
左側は、「STEMMA QT」コネクタ(SparkFunの「Qwiic」コネクタとコンパチブル)を持つタイプ(29.95ドル)で、右側は、コネクタレス(ジャンパ接続)のタイプ(34.95ドル)です。
どちらも、センサ機能は同じですが、今後搭載を予定しているガジェット内部のスペースに合わせ、どちらを採用するか判断します。
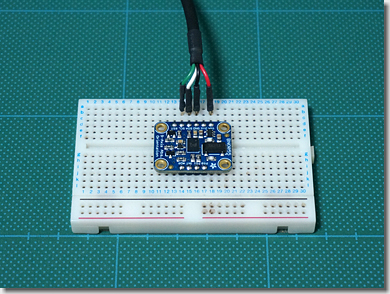
まずは、ブレッドボード上に実装し、テストしてみます。
(自動再生しない場合は、右クリックでメニュー)
ブレッドボードの動きに合わせ、3Dモデルが動いています。
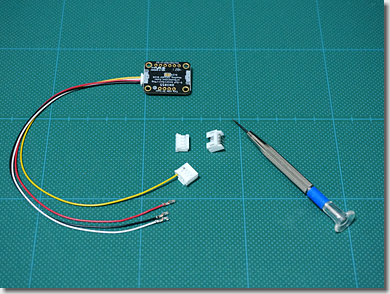
STEMMA QTコネクタ(JST SH)は1.0mmピッチで扱い難いため、秋月の変換ケーブルを使って、Groveコネクタ(JST PH)の2.0mmピッチに変換しておきます。

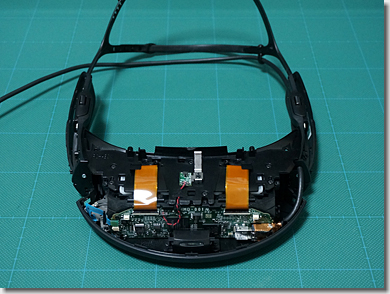
こちらが、9軸センサを取り付けるガジェットです。
世界初のHD有機ELパネルを搭載した、3D対応ヘッドマウントディスプレイ、Sonyの「HMZ-T1」(2011年11月11日発売)です。
「ソニー信者は20m先に750インチのスクリーンを見るか?」(2012年4月21日)
またも、お届け物が。
昨年11月の発売以来、長らく“超品薄状態”が続いていましたが、やっと届きました。
SONYさんの3D対応ヘッドマウントディスプレイ、「HMZ-T1」です。
(ソニーストア価格:59,800円、購入価格:53,222円)

いまからちょうど11年前に購入しましたが、ほとんど視聴することなく現在に至ります。0xF9C7

よってからに、ほぼ新品同然の状態で保管されていました。
で、ですね。
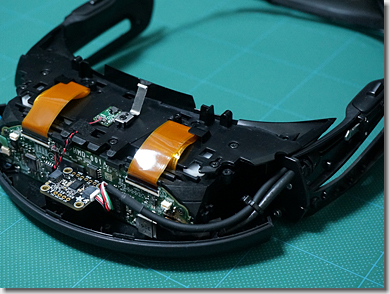
こいつを惜しげもなく、分解クンしてしまいます。0xF9F8
左右の眼に独立して配置される、HD有機ELパネルが見えます。
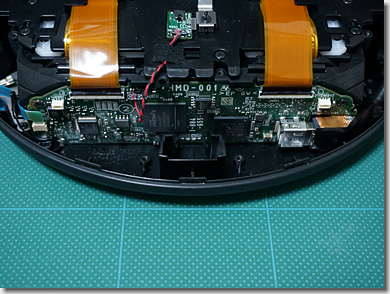
9軸センサを、できるだけヘッドマウントディスプレイのセンターに近いところに設置できるよう、場所を探します。
ちょうど、青色LEDのイルミネーションの発光部のところに設置できそうです。
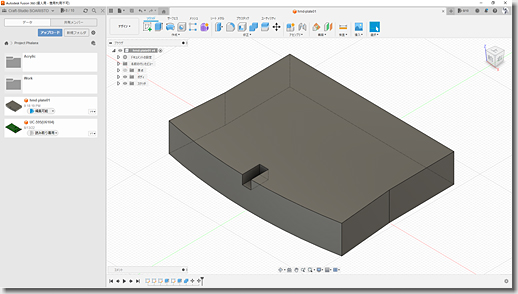
発光部の外枠を上手く活かして、9軸センサを取り付けられるよう、プレートを作製します。
いつものとおり、Autodesk Fusion 360でデザインし、Snapmaker 2.0 A350でミリングします。
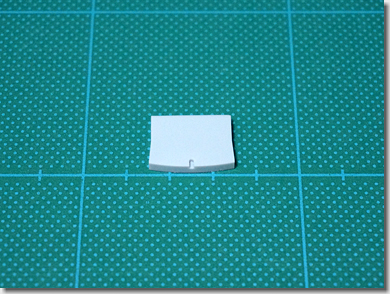
出来上がったプレートです。
Tiny Phalanxの端材、3mmのアクリル板をミリングしたものです。
真ん中のスリットは、元の外枠の突起を避けるためのものです。
ヘッドマウントディスプレイに、プレートを取り付けたところです。
3Mのプラスチック用強力接着剤を使って固定しました。
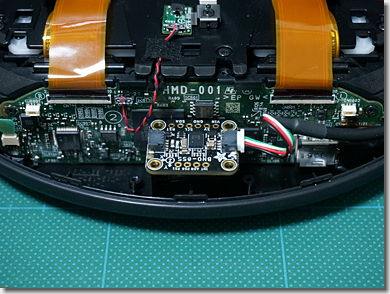
プレートに、9軸センサを取り付けたところです。
何かの時に取り外しが利くよう、両面接着テープを使って固定しました。
4芯ケーブルにSTEMMA QTコネクタを取り付け、9軸センサに接続します。
STEMMA QTコネクタは、1.0mmピッチの「JST SH」コネクタであるため、コンタクトピンを圧着するのは、非常に骨の折れる作業になります。
4芯ケーブルを、既存のケーブルに沿わせて処理します。
万が一、張力が掛かってもコネクタに負担が掛からないよう、HellermannTytonのインシュロック(AB80-W)で結束してから、筐体の外に引き出してあります。
ケーブルは、高性能多芯ソフトキャプタイヤケーブル、「ADS-VCTF」の「7/0.12 TA」(4芯、φ3.6mm)を使っています。

せっかくなので、HMZ-T1の一部を、塗装しておきました。
サンドペーパーで足付けをし、サーフェイサーをを吹いてから、中段はTAMIYAの「横須賀海軍工廠グレイ」、上段は「マットホワイト」で仕上げてあります。

分解クンした時と逆の手順で組み立て直して、完成。
3D対応ヘッドマウントディスプレイの、帝国海軍「横須賀鎮守府」仕様。
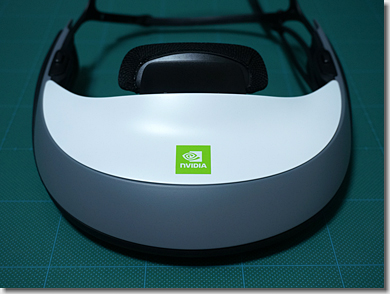
勝手に、nVIDIAのステッカーを貼ってみました。0xF9F8
(自動再生しない場合は、右クリックでメニュー)
HMDをJetson TX2に接続して、動作テスト。
初期位置をキャリブレーションしていないため、方向が微妙にズレていますが、頭部の動きに合わせ、3Dモデルが動いていることが分かります。

とりあえず、動作確認完了。
〔追加情報〕
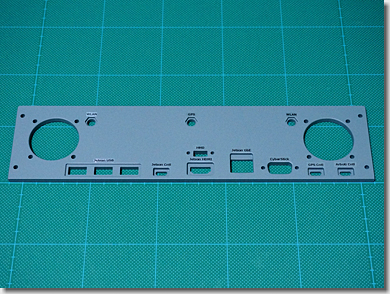
BNO055の搭載でGroveコネクタが追加となったため、リヤ上段パネルを作り直しておきました。
(つづく)
| 27 Related Entries | |
 ペガソス計画(22) - 週刊「ファランクスを作る」 | Next  ペガソス計画(24) - 週刊「ファランクスを作る」 |
 SOARISTO at 22:45:40
|
Comment(0)
|
Trackback(0)
SOARISTO at 22:45:40
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2023/04/230408.php
Post Comment