
前回から、ほぼ3年が経過してしまいましたが、思い出したかのように、再始動します。
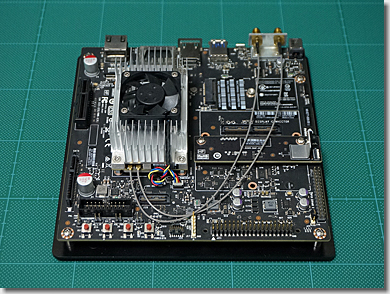
こちらは、今回のTiny Phalanxの頭脳となる、nVIDIAの「Jetson TX2 Developer Kit」(定価:88,992円)です。
コンピュータビジョンやディープラーニングなどに適用できる、組み込み用のスーパーコンピュータです。

大型のヒートシンクの下に、「Jetson TX2 Production Module」が鎮座ましましています。
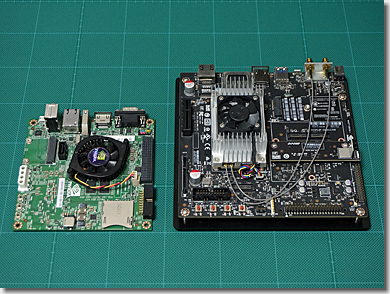
左側が、4年半ほど前に購入した、「Jetson TK1 Development Kit」で、右側が、今回購入した「Jetson TX2 Development Kit」です。

Jetson TK1の時と同様、ストレージの拡大のため、SSDを購入しました。
Corsairの「CSSD-F240GBLE200B」(左側)と「CSSD-F480GBLE200B」(右側)です。

こちらは、以前に購入してあった、Trossen Roboticsの「Dynamixel MX-64T Robot Actuator」(定価:299.90ドル×3個)です。
今回のTiny Phalanxの筋肉となるもので、6.0[Nm]もの高トルクを持ったアクチュエータ(サーボモータ)です。
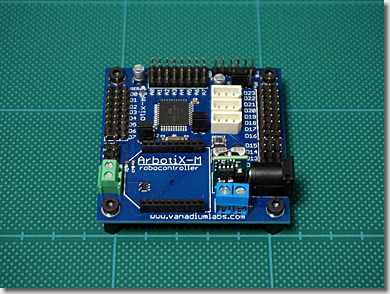
アクチュエータを制御するための、「ArbotiX-M Robocontroller」(定価:39.95ドル)です。
Arduinoベース(ATmega644P)のコントローラで、Dynamixelシリーズなどを制御するためのライブラリやスケッチが、Trossen Roboticsから提供されています。
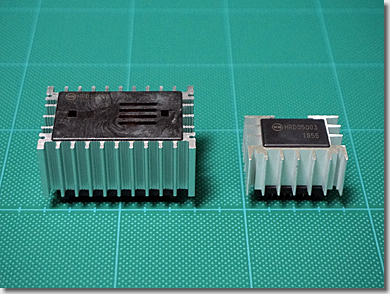
こちらは、アクチュエータとは別に、DCモータに電源を供給するための、放熱器付DC/DCコンバータです。
左側が、12V8Aまで供給できる「HRD12008」(購入価格:400円)で、右側が、5V3Aまで供給できる「HRD05003」(購入価格:300円)です。
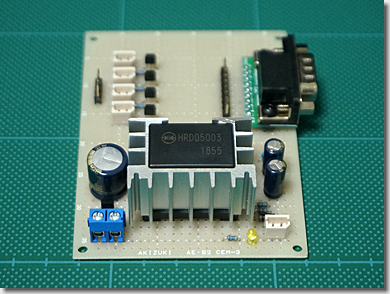
先に、「HRD05003」を使って、12Vから3Vを取り出す回路を作っておきます。
出力電圧3.0[V]を得るための外部抵抗R1は、計算式から1.55k[Ω]と求められます。
リファレンス端子に2つの抵抗(1.5k[Ω] + 51[Ω])を直列に接続したところ、出力電圧は3.011[V]となりました。(入力電圧12.08[V]時)
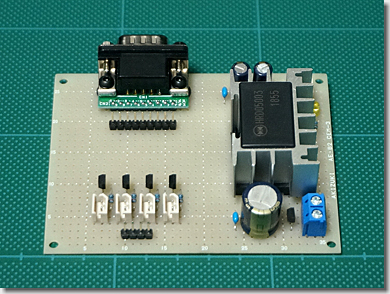
電圧出力は、ArbotiX-MのGPIOピンを、デジタルトランジスタ経由でリモートコントロール端子に接続し、ArbotiX-MからOn/Offできるようにしてあります。
コンデンサは、Panasonicの車載用の、長寿命・低ESRのものを使っています。
出力端子には、DCモータの停止時に発生する逆起電力から回路を保護するための整流用ダイオードを、並列に接続してあります。
回路左側上段は、SHARPの「CYBER STICK」用のインタフェース回路で、下段は、照明用の白色LEDをPWM制御するための回路です。
(つづく)
| 27 Related Entries | |
 ペガソス計画(1) - 電動マシンガンの改造 | Next  ペガソス計画(3) - 基台部分の組立 |
 SOARISTO at 20:44:04
|
Comment(0)
|
Trackback(0)
SOARISTO at 20:44:04
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2019/02/190224.php
Post Comment