
前回の続きです。
以前の「Z800DR」+「DRY-WiFiV5d」の時と同様、ドライブレコーダー本体に、セキュリティ性(視認性)を高めるための「超高輝度赤色LED」を埋め込むことにします。
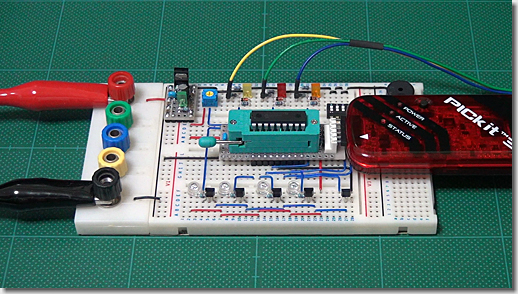
ブレッドボード上に仮組みした、評価用の回路です。
以前に設計した制御回路をベースに、さらに改良(後述)を施しています。
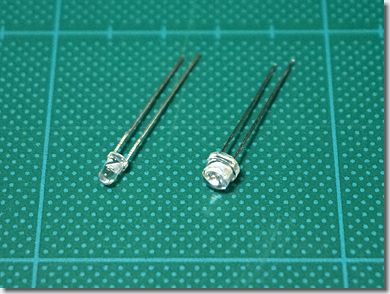
画像左側は、製作当初に使っていた、OptoSupply社の「OS5RAA3131A」です。φ3mmの「砲弾型」の超高輝度赤色LEDで、輝度は14,400~20,000mcdもありますが、指向角が30°と狭く、中心位置から少しでもズレると大きく輝度が落ちる、“狭角タイプ”のLEDでした。
画像右側は、製作途中で切り換えた、同じくOptoSupply社の「OS5RKE56C1A」です。φ4.8mmの「帽子型」の超高輝度赤色LEDで、輝度は12,000mcdと、「OS5RAA3131A」には及ばないものの、指向角が120°と非常に広く、ほぼどの角度から見てもLEDが点滅していることがはっきり分かる、“広角タイプ”のLEDです。
当初は「OS5RAA3131A」で作っていましたが、試作検証の結果、視認性を高めるため、途中から「OS5RAA3131A」に切り換えることにしました。
ただし、ここで、一部、“十分でない状況”が発生していました。
前者の「OS5RAA3131A」は、順電流(If)が、一般的なLEDの値である20mAで、後者の「OS5RAA3131A」は、Ifが60mAでした。後者のLEDの性能を十分に発揮させるためには、Ifを60mAとしてドライブする必要があります。
しかし、当時は、すでに制御回路のプリント基板を作ってしまっていたため、回路変更ができず、致し方なく、Ifが60mAのLEDを、20mAでドライブすることにしました。(20mAでも、1つのパッケージに3つの発光素子が封入されているため、けっこうな明るさでしたが)
とはいえ、やはり、「270km/h出るクルマは、270km/hで走ってみることに意味がある」ため(もちろん、サーキットなどで)、この機会に、制御回路を見直すことにしました。
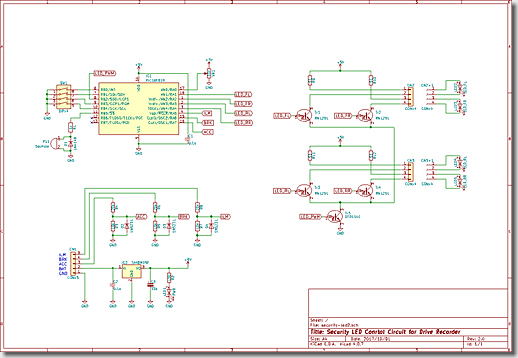
改良した、制御回路の回路図です。
順電流が60mAのLEDをドライブするには、PICの出力ではオーバーロードとなるため、「バイアス抵抗内蔵型トランジスタ」(後述)を組み合わせています。
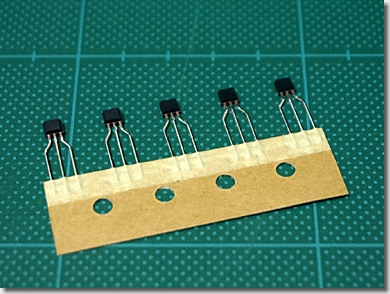
こちらが、「バイアス抵抗内蔵型トランジスタ」です。回路的には、バイポーラトランジスタの、ベース間に直列に、ベース・エミッタ間に並列に、抵抗が挿入されています。
1つのパッケージ(SC-72等)の中に、トランジスタと抵抗が封入されていることから、実装面積の低減や、部品点数の削減ができる、便利なトランジスタです。
PICを始めとする制御用マイコンなどとの親和性が高く、その扱い易さから、「デジタルトランジスタ」とも呼ばれています。
トランジスタのタイプとしては、PICの出力が「H」の時、スイッチング動作を「ON」にしたいため、「NPN型」(吸い込み型)のものを使っています。
前回は、順電流(If)が20mAのLEDを4つドライブすることから、コレクタ電流(Ic)が100mAまで流せるもので十分でした。今回は、Ifが60mAのLEDを4つドライブすることから、最低でも240mA、余裕を見て、Icが600mAのものを使うことにしました。(Icが300mAぐらいの、手頃なものがなかったため)
LEDの点灯制御(入口側)には、Icが100mAのものを、LEDのPWM制御(合流した出口側)には、Icが600mAのものを、それぞれ使い分けています。

また、せっかく回路を作り直すことから、LEDによる“光”の出力に加え、“音”の出力も追加してみました。
具体的には、回路に「圧電サウンダ」を追加し、セキュリティの動作モードの状態遷移が分かるようにしています。セキュリティがONになった場合は、「ピ、ピ、ピ」と、OFFになった場合には、「ピー、ピ、ピ」と、確認音がします。
画像左側が、muRataの「PKM13EPYH4000-A0」(φ13mm)、画像右側が、「PKM17EPPH4001-B0」(φ17mm)です。(今回は、基板の小型化のため、φ13mmのものを使用)
他励式のため、こちらもLEDと同様、PICの出力をPWM制御し、音程を付けています。
こちらは、今回のメインコントローラ、Microchip Technology社の「PIC16F819」です。
制御プログラムは、同社のCコンパイラ、「MPLAB XC8」で書いた後、細かなところを手動でオプティマイズし、高速化と省メモリ化を図っています。
PIC16F819内蔵のCCP(Compare / Capture / PWM)モジュールを、PWMモードで使用し、1kHzの周期(10bitの分解能)でLEDをPWM制御しています。あわせて、Timer0によるハードウェア割り込みを使用し、1kHzの周期で状態監視をしています。
また、前バージョンを取り付けてから、これまで1年半ほど使用していますが、ごく稀に、エンジンのON/OFFの前後で、LEDの点滅がフリーズしていることがありました。(これまでに2回ほど)
これは、バッテリーからの供給電圧の変動により、動作が不安定になったものと考えられることから、BOR(Brown Out Reset)機能をイネーブルにしておくことにしました。(前バージョンでは、設定を忘れていました)
(つづく)
| 16 Related Entries | |
Next  セキュリティLED制御回路の製作(2) | |
 SOARISTO at 22:34:12
|
Comment(0)
|
Trackback(0)
SOARISTO at 22:34:12
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2017/09/170930.php
Post Comment